Work
A selection of open-source work across 3D computer vision, robotics, and machine learning — from visual SLAM and deep image matching to LiDAR perception and state estimation.
-
Neuracore
Physical-AI infrastructure for robot learning — data capture, training, and deployment for embodied agents.
-
-
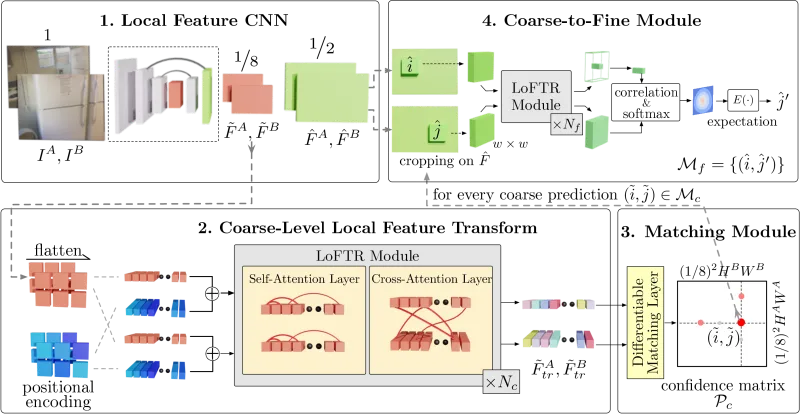
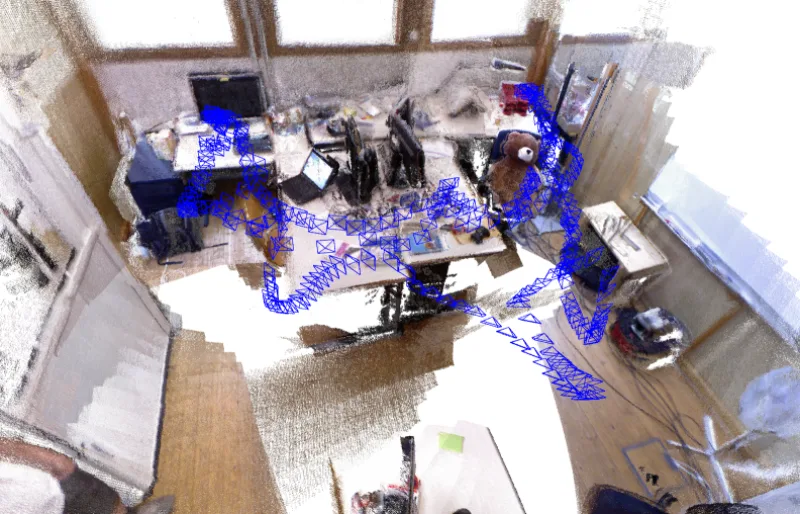
Deep Image Matching using Local Feature Transformer
Pose-estimation pipeline enabling 3D reconstruction using the Local Feature Transformer (LoFTR).
-
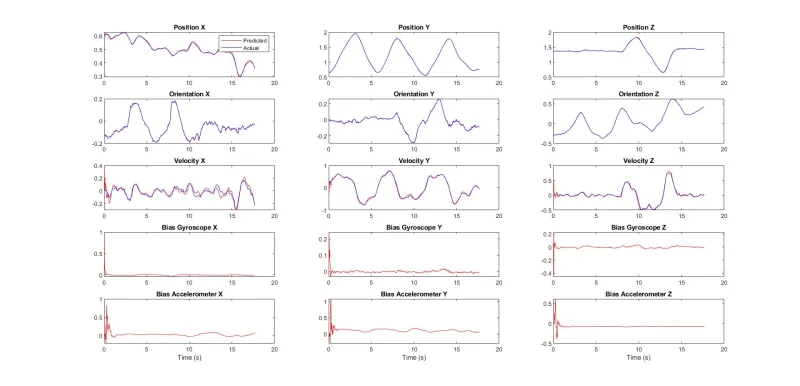
State Estimation of a Drone by Visual-Inertial Sensor Fusion
Optimal state estimation using extended & unscented Kalman filters, implemented in MATLAB.
-
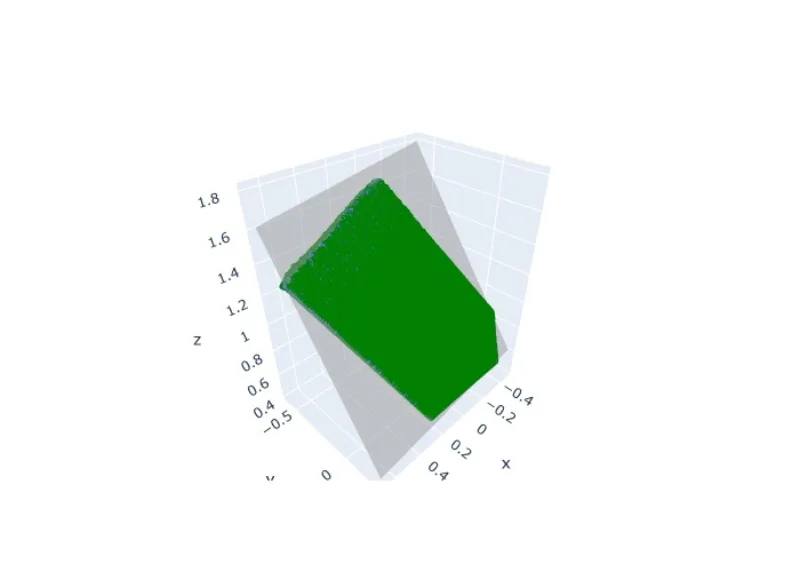
Fast Plane Extraction from a 3D Point Cloud
Fast, parallel implementation of the RANSAC algorithm to segment a plane in a point cloud.
Languages, frameworks, and tools I've worked with across research and engineering.
Languages
- Python
- C++
- C
- Rust
- TypeScript
- Bash
-
 MATLAB
MATLAB - JavaScript
- HTML
- CSS
Machine Learning
- PyTorch
-
 JAX
JAX - TensorFlow
- Keras
- Hugging Face
- Scikit-learn
- CUDA
- ONNX
- TensorRT
Vision, 3D & Scientific Computing
- OpenCV
- Open3D
-
 Eigen
Eigen - GTSAM
- NumPy
- SciPy
- Pandas
Web & APIs
- Next.js
- FastAPI
- Pydantic
Systems, Tooling & Cloud
- CMake
- Docker
- Linux
- Google Cloud
- GTest
- pytest